Edge Vision (ADAS)
Predictive Hazard Detection & Material Logic
The Perception Gap
Contemporary autonomous systems frequently encounter "texture confusion" in low-contrast environments, such as identifying a white vehicle against a bright, overcast sky. When standard neural networks rely solely on pixel-match patterns, small variations in lighting can lead to critical detection failure or "hallucinations".
The Trident Prime Engine (ADAS Horizon) utilizes the ISED Framework to bridge this gap. This technology—protected by U.S. Patent Application No. 63/940,736 and 63/983,021—implements Spectral Gradient Mapping and high-fidelity Spectral Structure Tensor analysis to achieve certainty where others have probability. The core logic is governed by the Spectral Consistency Index:
Our proprietary multi-channel spectral decomposition logic handles extreme dynamic range, while Full Stokes Polarimetry recovers surface normals and material classification to achieve high rejection of environmental noise.
Safety is anchored by adversarial integrity auditing, which provides a statistical integrity check of the spectral data. If a sensor failure or sensor spam injection is detected within the temporal frame-buffer, the engine applies a spectral alignment correction, maintaining inference stability before the downstream control signals can be compromised.
Spectral Threat Detection — Live Scan
TARGET: LOCKED
CONFIDENCE MATRIX
SYSTEM LOG
[ENGINE] Consistency check: Validated
[AUDIT] Sensor integrity secured.
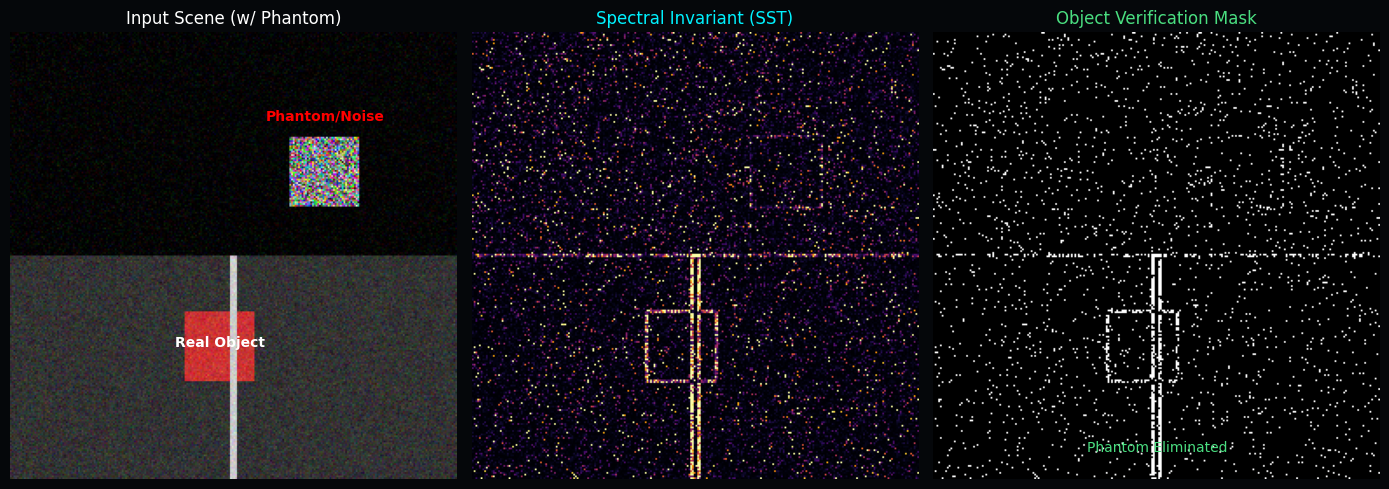
Technical Verification | Spectral Invariance
Conventional LIDAR/Vision fusion fails when encountering "phantom" data — sensor noise
or
adversarial patterns that look like real objects (High-Confidence False Positives).
Trident (B27) applies a spectral invariant
consistency check. As shown in the benchmark, the red "Phantom" noise patch has high
intensity but low spectral coherence (random anisotropy). The Trident filter rejects
this inconsistency, eliminating the false positive before it reaches the decision layer.
Automotive & Safety Value
Edge Vision provides physics-native perception that operates on verifiable physical invariants — zero training bias, zero ML failure modes:
- L4/L5 Autonomous Driving — Guaranteed hazard detection in fog, rain, and glare conditions where neural networks hallucinate
- Military ISR Platforms — Material classification of targets through Full Stokes Polarimetry, distinguishing metal from foliage at range
- Agricultural Robotics — Crop health assessment via spectral gradient mapping, independent of lighting conditions
Integration Path: B27 feeds into B16-GEO to provide glare-resilient SLAM landmarks for navigation in degraded visual environments.